
/cdn.vox-cdn.com/uploads/chorus_asset/file/24016885/STK093_Google_04.jpg)


/cdn.vox-cdn.com/uploads/chorus_asset/file/24808816/Starfield__The_Settled_Systems___Supra_Et_Ultra_____Starfield__The_Settled_Systems___Supra_Et_Ultra_2023_7_25_94252.263_1440p_streamshot.png)









Copyright by Intrinsic,
Finally, Intrinsic (a spin-off of Google-X) has revealed the product they are working on Open Source Robotics Corporation Team (among others): flowstat,
What is Flowstat?
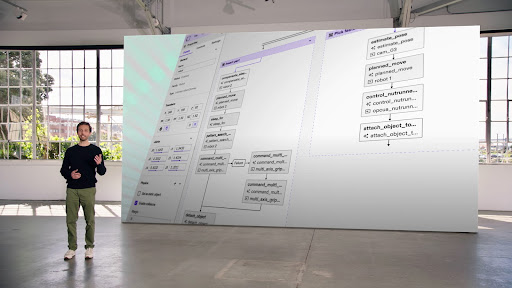
Introduction to Intrinsic Flowstate | internal (image copyrightIntrinsic,
Flowstate is a web-based software designed to simplify the creation of software applications for industrial robots. The application provides a user-friendly desktop environment where blocks can be combined to define the desired behavior of the industrial robot for specific tasks.
Good arguments
- Flowstat offers a wide range of features, including simulation test, debugging toolsand seamless Deployment for real robots,
- it is based on rosSo we should be able to use our favorite framework and all existing software to program on it, including gazebo simulation.
- It has a behavior tree based system for graphically controlling the program flow, which simplifies the way to create programs Now Running blocks around. But it is also possible to switch to expert mode to manually touch the code.
- it already has a library Robot Model and Hardware Ready to add, but you can also add your own.
- Additionally, the application provides pre-built AI skills Which can be used as modules to achieve complex AI results without the need for manual coding.
- One limitation (but I actually agree a good point) is that the tool is thought for industrial robots Not for service robots in general. This is good as it provides focus for the product especially for this initial release
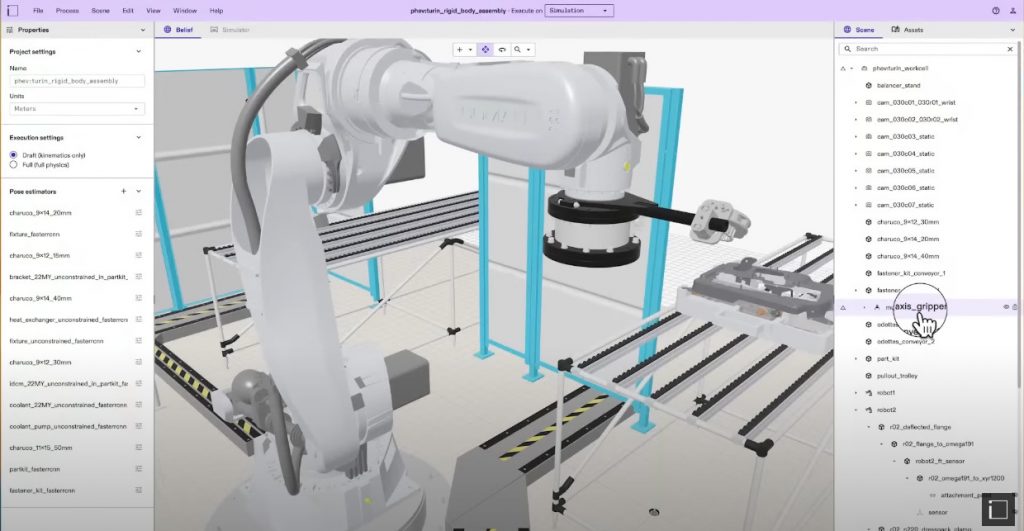
Flowstat | internal (image copyrightIntrinsic,
Based on the official post and the keynote released on Monday, May 15, 2023 (Available here), this is the information we have gathered so far. However, we currently do not have a comprehensive understanding of how the software works, its full feature set, and any potential limitations. To get more insight, we’ll have to wait until July of this year, hopefully I’ll be one of the lucky participants selected for the private beta (the beta is still available here).
ambiguous number
Even if I find Intrinsic’s proposal intriguing, I have identified three potential concerns about it:
- Interoperability has become a challenge across different hardware and software platforms, The hiring of the entire OSRC team by Intrinsic appears to address this issue, given that ROS is currently the closest system on the market to achieve such interoperability. However, the widespread adoption of ROS by industrial robot manufacturers is still limited, with only a few companies adopting it.
Ensuring hardware interoperability would require the adoption of a common framework by robot manufacturers, which is currently a distant reality. What we, the ROS developers, aim for right now is that someone should be able to create a ROS driver for the robot arm we want to use (e.g. the creator of the robot, or the team at ROS Industrial) . However, manufacturers are generally hesitant to develop ROS drivers due to potential commercial limitations and customer lock-in on purpose. Unless a platform dedicates substantial resources to developing and maintaining drivers for the supported robots, the challenge of hardware interoperability cannot be solved by a single platform alone (indeed, it is one of those goals). is one of what ROS-Industrial is trying to achieve).
Google has the potential to unite hardware companies toward this goal, as Intrinsic CEO Wendy Tan White said,It’s an ecosystem effortHowever, it is important for the industrial community to perceive tangible benefits and value in supporting this initiative beyond helping others build their businesses. The specific benefits to the ecosystem from supporting this initiative are not clear.
- Availability of pre-built AI skills for robots is a complex task, Consider a widely used skill in ROS, such as navigation or arm path planning, exemplified by Nav2 and MoveIt, which provide excellent functionality. However, integrating these skills into new robots isn’t as simple as plug-and-play. In fact, dedicated courses exist to teach users how to effectively use the various components of navigation within a robot. This highlights the challenges associated with implementing such skills for robots in general. Thus, it is reasonable to anticipate similar difficulties in developing pre-built skills within FlowState.
-
One last point that doesn’t seem clear to me (as it was not addressed in the presentation) is How the company is going to do business with Flowstat, This is a very important point for every robotics developer as we do not want to be locked into proprietary systems. We understand that companies must have a business, but we want to have a clear understanding of what that business is so that we can decide whether it is convenient for us, both in the short and long term. For example, Amazon’s RoboMaker didn’t gain much traction because developers running RoboMaker were forced to pay for the cloud when they could do the same thing (with less fancy stuff) for free on their local computers. Were.
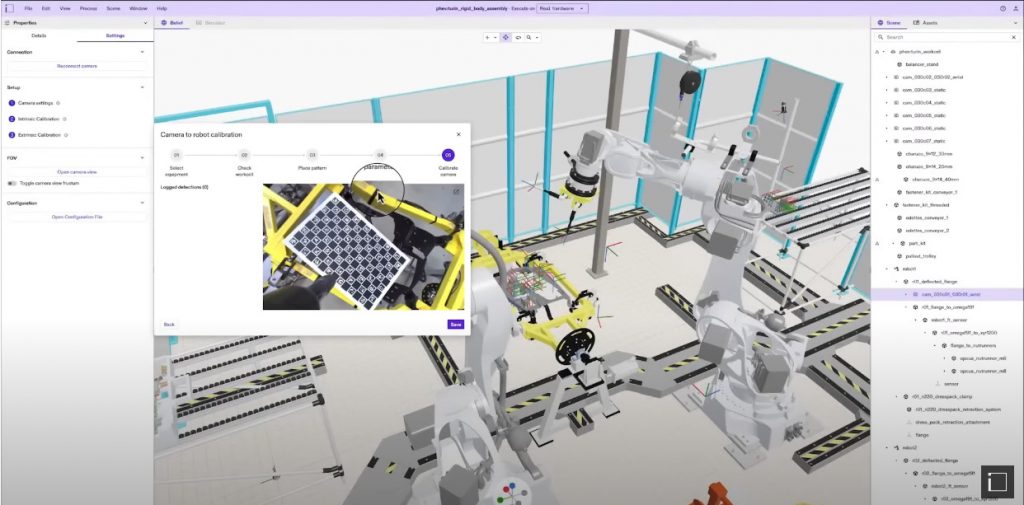
Flowstat | internal (image copyrightIntrinsic,
conclusion
Overall, while Flowstat shows promise, more information and practical experience are needed to assess its effectiveness and address potential challenges.
I have applied for the restricted beta. I hope to be selected so that I can experience it firsthand and report on it.
Please be sure to read the original post and the keynote presentation by Wendy Tan White, both of which can be found on Intrinsic’s web.
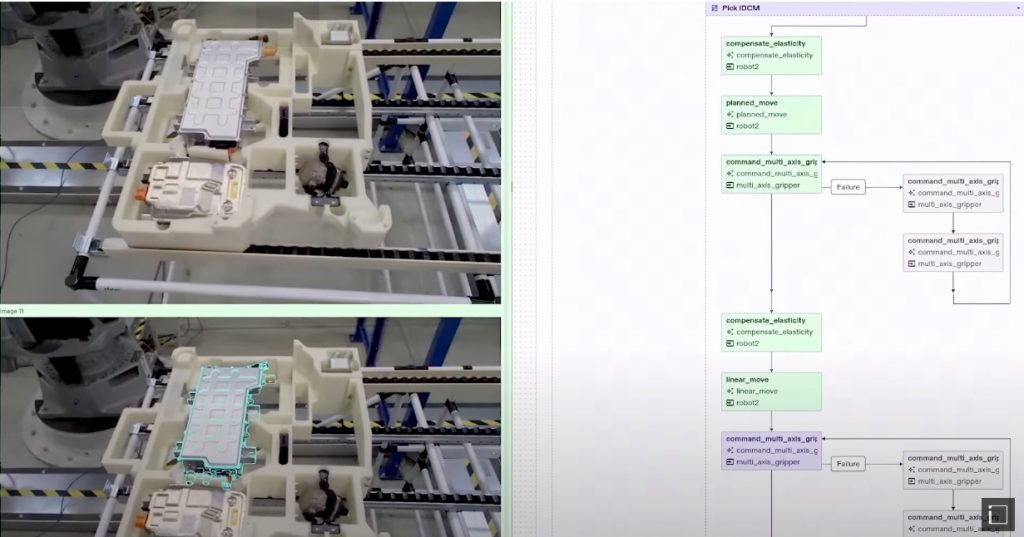
Flowstat | internal (image copyrightIntrinsic,

Ricardo Tellez
Co-founder and CTO of Construct

Copyright by Intrinsic,
Finally, Intrinsic (a spin-off of Google-X) has revealed the product they are working on Open Source Robotics Corporation Team (among others): flowstat,
What is Flowstat?
Introduction to Intrinsic Flowstate | internal (image copyrightIntrinsic,
Flowstate is a web-based software designed to simplify the creation of software applications for industrial robots. The application provides a user-friendly desktop environment where blocks can be combined to define the desired behavior of the industrial robot for specific tasks.
Good arguments
- Flowstat offers a wide range of features, including simulation test, debugging toolsand seamless Deployment for real robots,
- it is based on rosSo we should be able to use our favorite framework and all existing software to program on it, including gazebo simulation.
- It has a behavior tree based system for graphically controlling the program flow, which simplifies the way to create programs Now Running blocks around. But it is also possible to switch to expert mode to manually touch the code.
- it already has a library Robot Model and Hardware Ready to add, but you can also add your own.
- Additionally, the application provides pre-built AI skills Which can be used as modules to achieve complex AI results without the need for manual coding.
- One limitation (but I actually agree a good point) is that the tool is thought for industrial robots Not for service robots in general. This is good as it provides focus for the product especially for this initial release
Flowstat | internal (image copyrightIntrinsic,
Based on the official post and the keynote released on Monday, May 15, 2023 (Available here), this is the information we have gathered so far. However, we currently do not have a comprehensive understanding of how the software works, its full feature set, and any potential limitations. To get more insight, we’ll have to wait until July of this year, hopefully I’ll be one of the lucky participants selected for the private beta (the beta is still available here).
ambiguous number
Even if I find Intrinsic’s proposal intriguing, I have identified three potential concerns about it:
- Interoperability has become a challenge across different hardware and software platforms, The hiring of the entire OSRC team by Intrinsic appears to address this issue, given that ROS is currently the closest system on the market to achieve such interoperability. However, the widespread adoption of ROS by industrial robot manufacturers is still limited, with only a few companies adopting it.
Ensuring hardware interoperability would require the adoption of a common framework by robot manufacturers, which is currently a distant reality. What we, the ROS developers, aim for right now is that someone should be able to create a ROS driver for the robot arm we want to use (e.g. the creator of the robot, or the team at ROS Industrial) . However, manufacturers are generally hesitant to develop ROS drivers due to potential commercial limitations and customer lock-in on purpose. Unless a platform dedicates substantial resources to developing and maintaining drivers for the supported robots, the challenge of hardware interoperability cannot be solved by a single platform alone (indeed, it is one of those goals). is one of what ROS-Industrial is trying to achieve).
Google has the potential to unite hardware companies toward this goal, as Intrinsic CEO Wendy Tan White said,It’s an ecosystem effortHowever, it is important for the industrial community to perceive tangible benefits and value in supporting this initiative beyond helping others build their businesses. The specific benefits to the ecosystem from supporting this initiative are not clear.
- Availability of pre-built AI skills for robots is a complex task, Consider a widely used skill in ROS, such as navigation or arm path planning, exemplified by Nav2 and MoveIt, which provide excellent functionality. However, integrating these skills into new robots isn’t as simple as plug-and-play. In fact, dedicated courses exist to teach users how to effectively use the various components of navigation within a robot. This highlights the challenges associated with implementing such skills for robots in general. Thus, it is reasonable to anticipate similar difficulties in developing pre-built skills within FlowState.
-
One last point that doesn’t seem clear to me (as it was not addressed in the presentation) is How the company is going to do business with Flowstat, This is a very important point for every robotics developer as we do not want to be locked into proprietary systems. We understand that companies must have a business, but we want to have a clear understanding of what that business is so that we can decide whether it is convenient for us, both in the short and long term. For example, Amazon’s RoboMaker didn’t gain much traction because developers running RoboMaker were forced to pay for the cloud when they could do the same thing (with less fancy stuff) for free on their local computers. Were.
Flowstat | internal (image copyrightIntrinsic,
conclusion
Overall, while Flowstat shows promise, more information and practical experience are needed to assess its effectiveness and address potential challenges.
I have applied for the restricted beta. I hope to be selected so that I can experience it firsthand and report on it.
Please be sure to read the original post and the keynote presentation by Wendy Tan White, both of which can be found on Intrinsic’s web.
Flowstat | internal (image copyrightIntrinsic,
Ricardo Tellez
Co-founder and CTO of Construct

{kind=link}